Simulationsmodelle für die Planung nachhaltiger Mobilität
Die Planung nachhaltiger Mobilität ist ein komplexer Prozess. Dazu gehören Herausforderungen in Bezug auf die Gewohnheiten von Menschen, neue technologische Entwicklungen sowie neue Geschäftsmodelle, die sich vom traditionellen Verkehrsmanagement unterscheiden.
Zum Erreichen des Ziels nachhaltiger Mobilität müssen diese Aspekte mit Unterstützung passender Werkzeuge getroffen werden, welche sowohl zukünftige Entwicklungen als auch die unterschiedlichen Interessen der beteiligten Akteure berücksichtigen.
Wie kann SmartUpLab die Planung einer nachhaltigen Mobilität unterstützen?
SmartUpLab bietet eine intelligente Lösung, die die Herausforderungen der Planung und Bedürfnisse der verschiedenen an der Mobilitätsplanung beteiligten Akteure einbezieht. Zu diesem Zweck gibt es zwei Wege, die miteinander verbunden sind:
- Digitale Planungswerkzeuge:
Dieser Begriff bezieht sich auf Instrumente, die eine Vielzahl von Parametern zur Betrachtung und Planung komplexer Prozesse und Systeme unterstützen. Dies können zu installierende Desktop-Anwendungen sein, aber auch offene Online-Tools.
- Computergestützte Simulationsmodelle von Mobilität:
Diese bestehen aus Werkzeugen zur Simulation der Bewegungen von Agenten, wie z.B. Nutzern des ÖPNV, in Abhängigkeit von Standort, Geschwindigkeit, Transportmittel und Richtung über bestimmte Zeiträume.
Wie es funktioniert? Ein erklärendes Beispiel
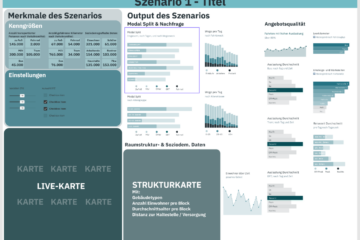
In der obigen Abbildung ist zu sehen, wie potentielle Parkflächen im Rahmen der Entwicklungen von SmartUpLab anhand vorhandener Geo-Daten und wissenschaftlicher Parameter ermittelt werden konnten.
Mithilfe eines Geographischen Informationssystems (GIS) sowie Daten von OpenStreetMaps, visualisieren wir die Straßen in unserem Zielgebiet, geben die Richtung des Verkehrsflusses an und identifizieren relevante Knoten.
Auf der Basis dieser Geodaten definieren wir die Basis unseres Simulationsmodells, z.B. für die Identifizierung von Parkflächen: Über Knotenpunkte eliminieren wir nicht relevante Zonen.
Potentielle Parkflächen können separat auf Gegenverkehrs- und Einbahnstraßen identifiziert werden. Die theoretischen und technischen Grundlagen können Mobilitätsplanungsprozesse im Zielgebiet unterstützen, sowie in anderen Städten und Regionen.
Fragen dazu? Bitte richten Sie die an smartuplab@fh-potsdam.de

0 Kommentare